Engineering & Development Dept.
KANZAKI KOKYUKOKI MFG.CO., LTD.
YANMAR Technical Review
Hydraulic Front Wheel Drive (HFWD) That Reduces Damage for a Lawn
Abstract
Four-wheel drives generally provide excellent traction, however it tends to have poor turning performance. Hydraulic front-wheel drive (HFWD) can offer smooth turning on a lawn so that vehicles with HFWD reduce damage for the lawn.
1.Introduction
Riding lawn mowers are made to work over the lawn, their tires must always crush down the grass while they are traveling.
Vehicles with two-wheel drive do not damage the lawn so badly unless sudden acceleration or braking is activated. On the other hand vehicles with four-wheel drive can easily damage the lawn with a simple operation of turning. Even if lawnmowers trim the lawn in a sophisticated manner, it makes no sense that the vehicles tires tread down on the lawn. This problem makes Kanzaki to develop a newly hydraulic front-wheel drive (HFWD) system for four-wheel drive vehicles that reduce damage for the lawn.
The patent obtained during the process of the development, “Axle Drive Mechanism for Four-Wheel Drive Lawn Mower” (patent No. 4521627), was awarded the Prize of the Director-General of the Kansai Bureau of Economy, Trade and Industry at the FY2011 Kinki Regional Invention Awards.
2.Turning Performance Characteristics
Four-wheel drive mechanisms generally used in tractors as lawn mowers having front and rear wheels which are mechanically linked by a drive shaft, the speed ratio between the front and rear wheels is fixed.
This is not a major problem when traveling in a straight line, however when turning, the turning radius ratio between front and rear wheels varies depending on a steering angle, therefore the vehicle is unable to turn smoothly due to the fixed speed ratio between front and rear wheels.
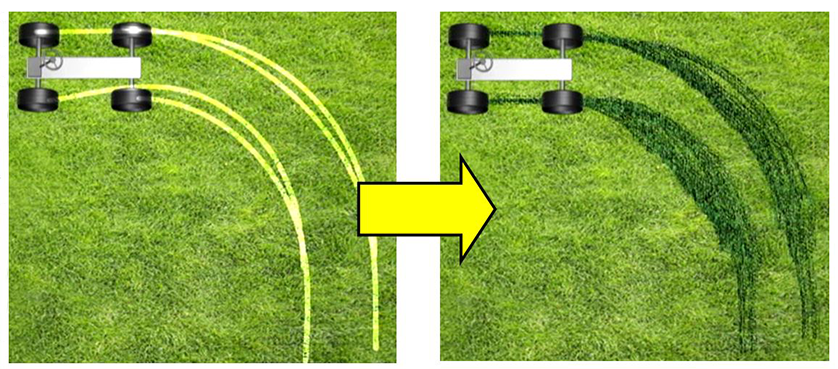
As shown in Fig. 2, tires are dragged on the lawn due to the difference between turning radius ratio and wheel speed ratio so that it causes damage for the lawn. To achieve smooth turning while maintaining traveling performance, it is necessary to vary a wheel speed ratio of either one of rear or front wheels in accordance with the steering angle.
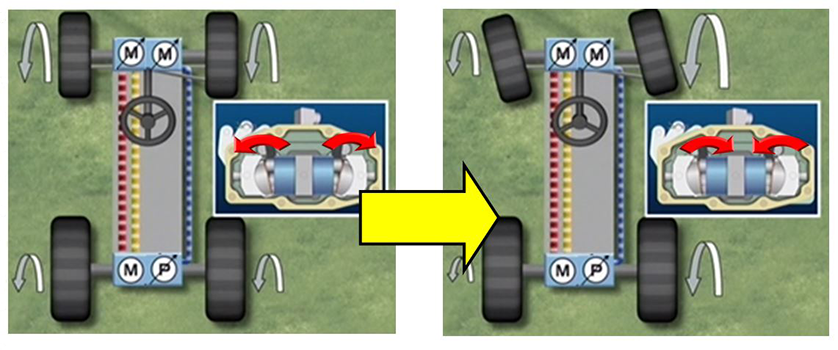
Fig. 3 shows a hydraulic four-wheel drive system in which hydraulics are used to provide serial coupling through hydraulic pipework between the rear transmission, which incorporates a hydraulic pump and hydraulic motor, and the front axle, in which two hydraulic motors are placed in parallel.
Hydraulic Motor Swash Plate Angle in Accordance with Steering Angle
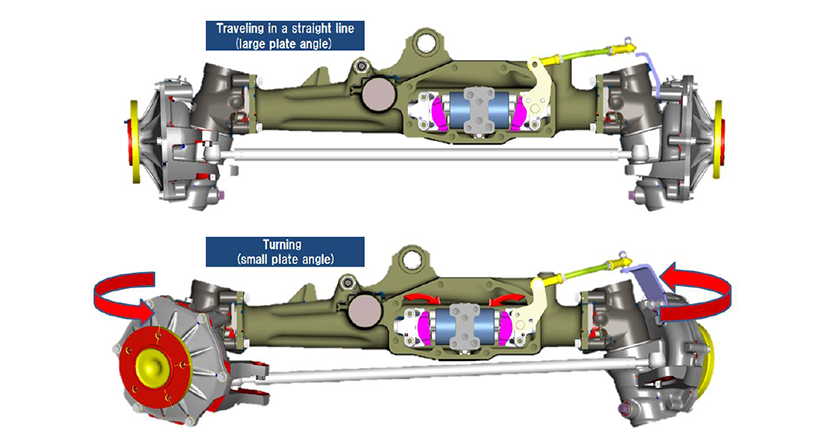
As shown in Fig. 4, the front axle of the hydraulic four-wheel drive system (HFWD) works by varying the swash plate angle for the variable hydraulic motor in accordance with the steering angle, thereby enabling to maintain an appropriate speed ratio between front and rear wheels in accordance with the turning radius.
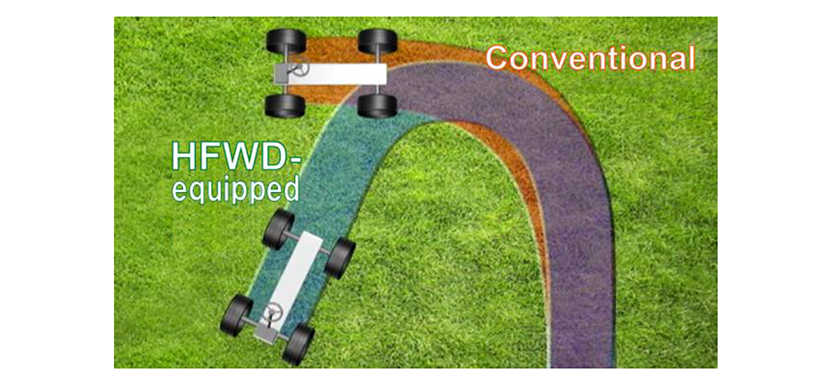
As a result, vehicles with HFWD are able to turn more smoothly and obtain a smaller turning radius than a conventional one, as shown in Fig. 5.
3.Adjusting Tips for Speed Ratio between Front and Rear Wheels
Note that traveling in straight, setting the front wheel speed higher than the rear causes excessive power consumption due to power circulation between the rear and front wheels via the ground (rear and front wheels working in opposition to each other).
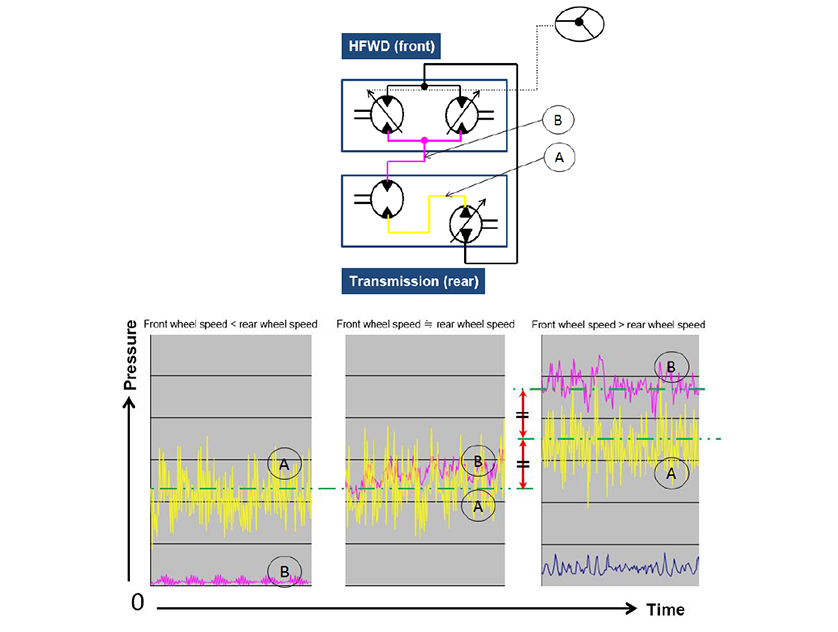
As shown by the pressure waveforms in Fig. 6, setting the front wheel speed higher than that of the rear causes changes the order as position B comes on the upper side of A.
Normally the vehicles should be travelled under the pressure indicated by the pressure waveform on the left Fig. On the other hand, pressure waveform on the right Fig. shows that excess pressure is generated corresponding to unnecessary work by setting the front wheel speed being higher than that of the rear.
The faster the speed of front wheel against that of the rear, the higher the pressure that occurs while travelling. Whereas setting the same speed for both rear and front wheels at the same speed results in the same pressure at measurement positions A and B, as shown by the pressure waveform in the center Fig .
Up to this point power circulation doesn’t occur. That is, where the pressures at both measurement positions A and B become equal to the pressure at measurement position A in the waveform on the left Fig. Point is that those hydraulic four-wheel drive systems in which rear transmission and front axle are coupled in series, the front wheel speed needs to be set to the same, or a slower speed than that of the rear.
While HFWD can set the speed of the front wheels as required by adjusting the angle of the swash plate in the variable hydraulic motor, reducing too much for the front wheel speed generates negative pressure at measurement position B, therefore the adjustment range needs to be kept within an acceptable range.
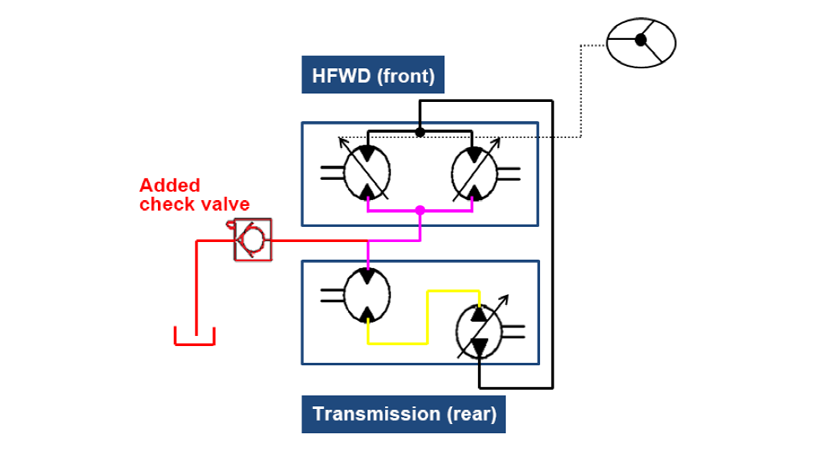
However, the effective tire radius changes with various factors such as a tire pressure or a weight distribution of working attachments, the speed ratio between front and rear wheel is likely to vary. As a consequence, the available setting range of wheel speed ratio is considerably limited so that accurate adjustment is required for each vehicle one by one. As shown in Fig7. a check valve is inserted into the hydraulic circuit coupling the rear transmission and front axle, and ensures that no negative pressure occurs even if the front wheel speed is set relatively low. Accordingly this permits available setting range of speed ratio widely and also improves productivity.
Thus a hydraulic front-wheel drive (HFWD) system for four-wheel drive vehicles that reduces damage for the lawn has developed.
4.Advantages of Not Having a Driveshaft
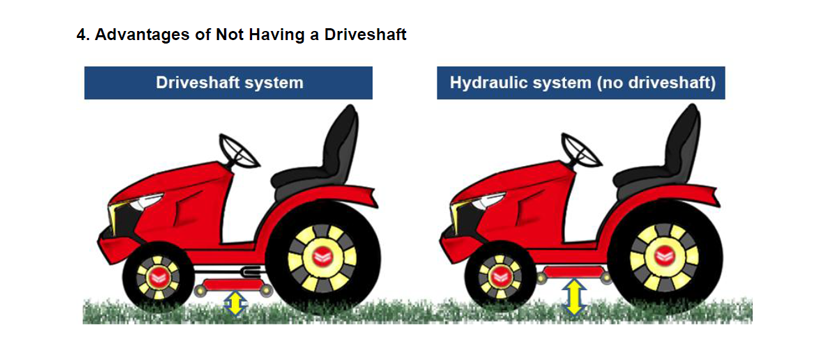
As shown in the left Fig. 8. one of the problems for four-wheel-drive system with a driveshaft is that the space available for lifting up the mower is limited. A lack of adequate mower lift space increases the risk of mower colliding with obstacles when traveling without mowing operation.
Whereas, as shown in the right Fig 8. hydraulic four-wheel drive can eliminate the driveshaft and provide flexibility where to locate the hydraulic pipework, instead, it enables the same degree of mower height as is possible with a two-wheel-drive lawn mowers. This also makes it easier for vehicle manufacturers to convert their existing two-wheel-drive vehicles to four-wheel drive.
5. Conclusions
HFWD front axle for hydraulic four-wheel drive systems with Ackermann steering-type featuring its superior driving performance are welcomed as very attractive proposition in Europe where hilly terrain is common, and rising demand for four-wheel drive. Some European agricultural machinery trade show offered guests to drive hydraulic four-wheel drive with HFWD on muddy, steep off-road test drive condition.
We will keep on working to develop very-appealing products to the customer into the future.
-IMPORTANT-
The original technical report is written in Japanese.
This document was translated by R&D Management Division.
Author

